
|转至:输配电线路
GNSS概述
1.1 GNSS发展
1.1.1 GNSSd的含义
GNSS(Global Navigation Satellite System)是全球导航卫星系统的英文缩写,它是所有全球导航卫星系统及其增强系统的集合名词,是利用全球的所有导航卫星所建立的覆盖全球的全天侯无线电导航系统。目前可供利用的全球卫星导航系统有美国的GPS和俄罗斯的GLONASS以及欧洲的Galileo和中国的北斗。

..................................................
1.1.2 美国的GPS
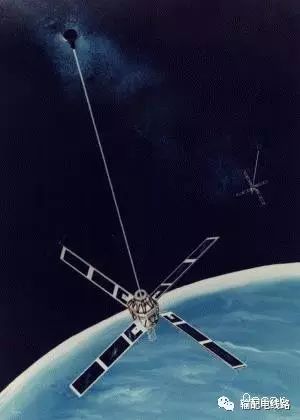
GPS是英文Global Positioning System或NAVigation Satellite Timing And Ranging Global Position System的缩写,即全球定位系统,是一个全球性、全天候、全天时、高精度的导航定位和时间传递系统。由24颗工作卫星和4颗备用卫星组成,分布在6个等间距的轨道平面上。采用码分多址体制,每颗卫星的信号频率和调制方式相同,不同卫星的信号靠不同的伪码区分,现有30多颗卫星。
GPS自1973年开始设计、研制,历时20年,于1993年全部建成,GPS系统由空间部分、地面控制部分和用户部分所组成。

..................................................
1.1.3 罗斯的GLONASS
格洛纳斯GLONASS是俄文GLObalnaya NAvigatsionnaya Sputnikovaya Sistema的首字母。已经于2011年1月1日在全球正式运行。根据俄罗斯联邦太空署信息中心提供的数据(2012年10月10日),目前有24颗卫星正常工作、3颗维修中、3颗备用、1颗测试中。
“格洛纳斯”系统标准配置为24颗卫星,而18颗卫星就能保证该系统为俄罗斯境内用户提供全部服务。该系统卫星分为“格洛纳斯”和“格洛纳斯-M”两种类型,后者使用寿命更长,可达7年。研制中的“格洛纳斯-K”卫星的在轨工作时间可长达10年至12年。
..................................................
1.1.4 欧盟的Galileo
伽利略卫星导航系统(Galileo satellite navigation system),是由欧盟研制和建立的全球卫星导航定位系统,该计划于1999年2月由欧洲委员会公布,欧洲委员会和欧空局共同负责。系统由轨道高度为23616km的30颗卫星组成,其中27颗工作星,3颗备份星。卫星轨道高度约2.4万公里,位于3个倾角为56度的轨道平面内。截止2016年12月,已经发射了18颗工作卫星,具备了早期操作能力(EOC),并计划在2019年具备完全操作能力(FOC)。全部30颗卫星(调整为24颗工作卫星,6颗备份卫星)计划于2020年发射完毕。
..................................................
1.1.5 中国的北斗
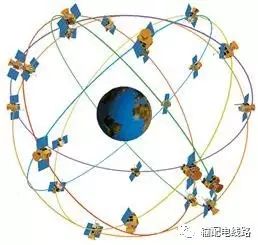
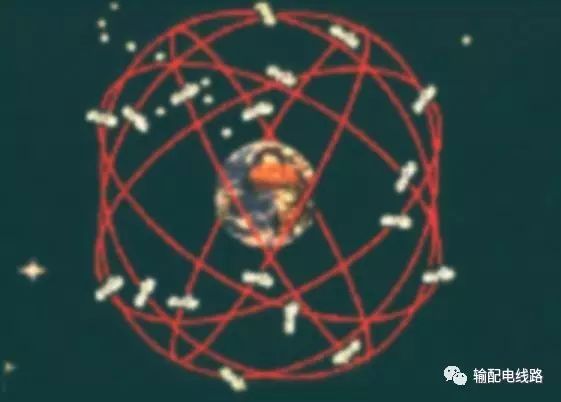
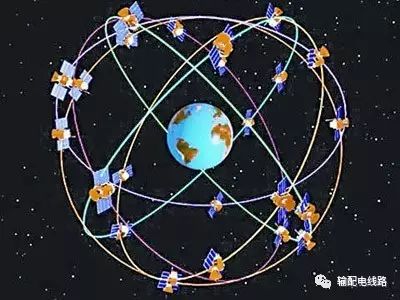
中国北斗卫星导航系统(BeiDou Navigation Satellite System,BDS)是中国自行研制的全球卫星导航系统。是继美国全球定位系统(GPS)、俄罗斯格洛纳斯卫星导航系统(GLONASS)之后第三个成熟的卫星导航系统。北斗卫星导航系统(BDS)和美国GPS、俄罗斯GLONASS、欧盟GALILEO,是联合国卫星导航委员会已认定的供应商。
北斗卫星导航系统由空间段计划由35颗卫星组成,包括5颗静止轨道卫星、27颗中地球轨道卫星、3颗倾斜同步轨道卫星。5颗静止轨道卫星定点位置为东经58.75°、80°、110.5°、140°、160°,中地球轨道卫星运行在3个轨道面上,轨道面之间为相隔120°均匀分布。至2012年底北斗亚太区域导航正式开通时,已为正式系统在西昌卫星发射中心发射了16颗卫星,其中14颗组网并提供服务,分别为5颗静止轨道卫星、5颗倾斜地球同步轨道卫星(均在倾角55°的轨道面上),4颗中地球轨道卫星(均在倾角55°的轨道面上)。

..................................................
1.1.6 增强型系统 SBAS
SBAS ( Satellite Based Augmentation Systems)是利用地球静止轨道卫星建立的地区性广域差分增强系统:
EGNOS—— 欧航空局接收卫星导航系统
WASS —— 美国雷声公司的广域增强系统
MSAS —— 日本的多功能卫星增强系统
1.2 GNSS的特点
定位精度高
观测时间短
测站间无须通视
可提供三维坐标
操作简便
全天候作业
功能多、应用广
免费
1.3 GNSS产业构成
1.3.1 军事用途
GPS本身就是军事竞赛的产物。精码保密,主要提供给本国和盟国的军事用户使用;粗码提供给本国民用和全世界使用。
1.3.2 民用导航
占据了民用领域的绝大部分,一般精度要求不高,5-15米,飞机、轮船、车载定位等领域。
1.3.3 测绘
要求精度高,早期主要在石油部门使用,现在已在测绘相关行业中广泛普及,成为一种新的测绘方式。
1.3.4 GIS
现在处于起步阶段,随着数字地球、数字中国的进程,必将成为一个庞大的新兴产业。
1.4 GNSSS应用
军事
测绘
林业
农业
地质
电力
水利
交通
环保
气象
地震
石油
通讯
海洋
城建
科研院所
院校
医疗
消防
国土
1.5 什么是RTK
RTK(Real - time kinematic)载波相位差分技术,是实时处理两个测量站载波相位观测量的差分方法,将基准站采集的载波相位发给用户接收机,进行求差解算坐标。这是一种新的常用的GPS测量方法,以前的静态、快速静态、动态测量都需要事后进行解算才能获得厘米级的精度,而RTK是能够在野外实时得到厘米级定位精度的测量方法,它采用了载波相位动态实时差分方法,是GPS应用的重大里程碑,它的出现为工程放样、地形测图,各种控制测量带来了新曙光,极大地提高了外业作业效率。
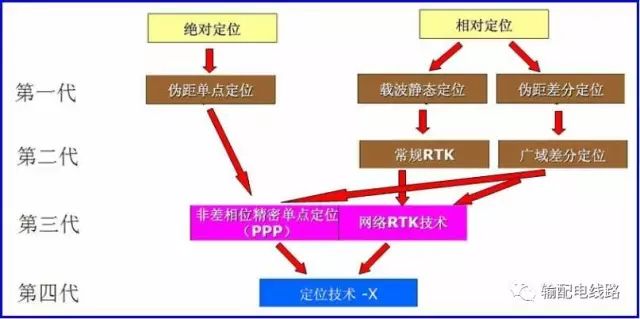
1.6卫星定位的发展
1.6.1 RTK常用国外品牌
Trimble (美国天宝)
Leica(瑞士莱卡)
Magellan( 美国麦哲伦)
TOPCON(日本拓普康)
1.6.2 RTK常用国内品牌
华测
南方
中海达
注:以上是小编较为熟悉的品牌,除开以上品牌外还有其他常用较多的品牌,小编今后将从上面的品牌中针对仪器的具体操作步骤作具体介绍,尽请关注。
02传统RTK以及仪器的操作
2.1 传统RTK的含义
常规的GPS测量方法,如静态、快速静态、动态测量都需要事后进行解算才能获得厘米级的精度,而RTK是能够在野外实时得到厘米级定位精度的测量方法,它采用了载波相位动态实时差分(Real - time kinematic)方法,是GPS应用的重大里程碑,它的出现为工程放样、地形测图,各种控制测量带来了变革,极大地提高了外业作业效率。
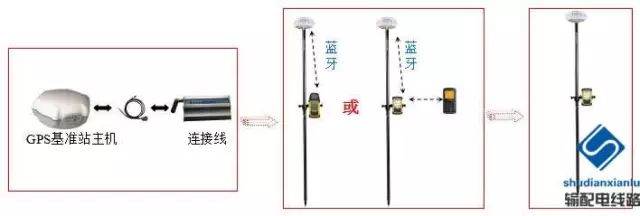
2.2 RTK的工作原理
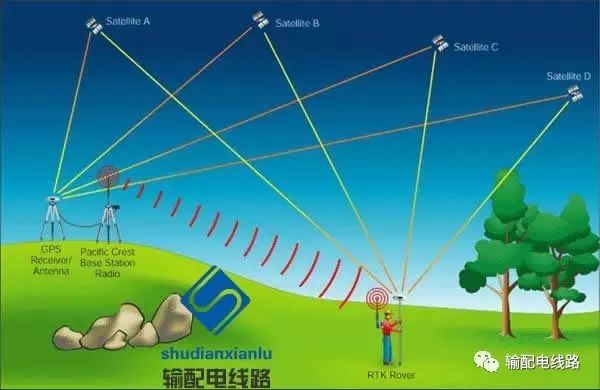

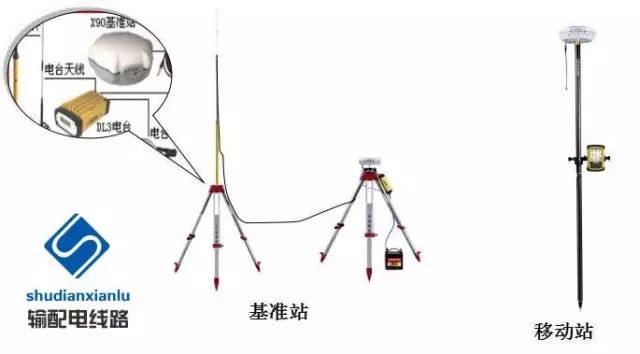
RTK的工作原理图

RTK的工作原理是将一台接收机置于基准站上,另一台或几台接收 机置于载体(称为流动站)上,基准站和流动站同时接收同一时间、同一GPS卫星发射的信号,基准站所获得的观测值与已知位置信息进行比较,得到GPS差分改正值。然后将这个改正值通过无线电数据链电台及时传递给共视卫星的流动站精化其GPS观测值,从而得到经差分改正后流动站较准确的实时位置。
RTK的观测模型为:
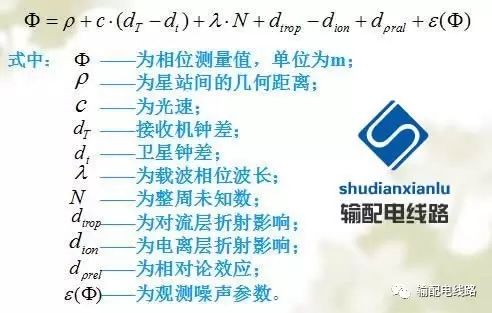
2.3 电台或网络模式及具体操作
2.3.1 电台模式
UHF(Ultra High Frequency)超高频率,频率300MHz-300KMHz(波长属微波:波长1M-1MM,空间波,小容量微波中继通信 )——410-430MHz /450-470MHz
VHF(Very High Frequency)甚高频(3MHz~30MHz属短波:波长100M-10M,空间波 )——220-240MHz
2.3.1.1 特点
a)作业距离一般距离为:0-28公里,特别是山区或城区传播距离就会受到影响;
b)电台信号容易受干扰,所以要远离大功率干扰源;
c)电台的架设对环境有非常高的要求,一般选在比较空旷,周围没有遮挡,且要基站架设的越高距离越远;
d)对于电瓶的电量要求较高,出外业之前电瓶一定要充满或有足够的电量;
2.3.1.2 具体操作
a)、基准站的架设:
对于任意架站,选择环境相对空旷的地方,地势相对较高的地 方且周围没有干扰的地方架设;架设仪器,架设时,注意仪器的安装以及各种线的连接;发射天线最好远离基准站主机3米以上.
b)、基准站的启动:
如果是自启动,则开机即可(主机搜完星后便可发射,最后电台接上电瓶,注意正负极的连接)。
c)、查看基准站是否已经正常发射
查看电台的电台灯是否一秒闪烁一次;注意电台面板上的电压是否在跳动,发射功率越大,电压跳动的幅度也越大;如果显示“太低”,注意更换电瓶或降低发射功率;查看流动站电台灯是否闪烁,能否差分。
d)、流动站的启动:
移动站与手簿测地通通过串口线或蓝牙进行连接;移动站电台灯如果一秒钟闪烁一次表示收到电台信号,在“单点定位”的情况下,直接点“测量”— “启动移动站接收机”即可,大约十多秒后就可差分,达到固定解;固定后可进行其他测量了。
e)、测量或放样
2.3.2 网络模式
GPRS(General Packet Radio Service)中文是通用分组无线业务,是在现有的G2SM系统上发展出来的一种新的分组数据承载业务 ;CDMA为码分多址数字无线技术
2.3.2.1 模式

2.3.2.2 方式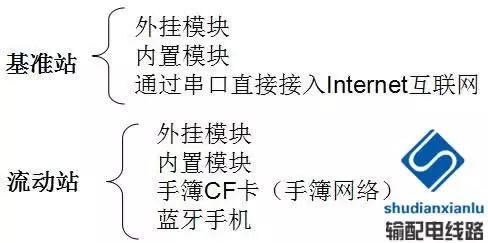
2.3.2.3 模式特点
优点:
距离远
携带方便
缺点:
容易造成差分数据延迟2-5秒
在没有手机信号的地方无法使用
需要一定的费用、手机卡一般一个月都要流量100—200元费用
2.3.2.4 基准站设置
对内置GPRS模块进行设置。不同品牌有差异,具体看使用说明。

03网络RTK以及仪器的操作
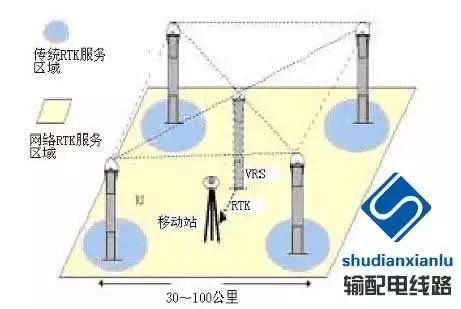
3.1 网络RTK技术
传统RTK技术有着一定局限性,使得其在应用中受到限制,主要表现为:
1. 用户需要架设本地的参考站;
2. 误差随距离增长;
3. 误差增长使流动站和参考站距离受到限制,距离越远初始化时间越长;
4. 可靠性和可行性随距离降低。
网络RTK技术实际上是一种多基站技术,它在处理上利用了多个参考站的联合数据。该系统不仅仅是GPS产品,而是集internet技术,无线通讯技术,计算机网络管理和GPS定位技术于一身的系统,包括,通讯控制中心,固定站,用户部分。
网络RTK的优势:
1.无需架设参考站,省去了野外工作中的值守人员和架设参考站的时间,降低了作业成本,提高了生产效率;
2.传统“1+1”GNSS接收机真正等于2,生产效率双倍提高 ;
3.不需要在四处找控制点;
4.扩大了作业半径,网络覆盖范围内能够得到均等的精度;
5.在CORS覆盖区域内,能够实现测绘系统和定位精度的统一,便于测量成果的系统转换和多用途处理;
3.2 CORS系统
连续运行参考站(cors)也称为台站网,可定义为:一个或若干个固定的、连续运行的GNSS参考站,利用现代计算机、数据通信和互联网(LAN/WAN)技术组成的网络,实时地向不同类型、不同需求、不同层次的用户自动地提供经过检验的不同类型的GNSS观测值(载波相位,伪距),各种改正数、状态信息,以及其他有关GNSS服务项目的系统。
目前,国内外多CORS的研究主要集中在基础设施建设、系统自动化管理、数据采集域分发、基于网络的GNSS定位技术的开发等方面。先后出现了大量的CORS工程项目。
其中具有代表性的全球和国家的项目包括:
⑴ IGS跟踪站网络
⑵ 美国NGS CORS
⑶ 欧洲EPN永久性连续网等
国内主要有:
⑴ 中国地壳运动观测网络CMONOC
⑵ 中国沿海无线电指向标-差分定位系统(RBN-DGPS)等项目
3.3 CORS系统组成
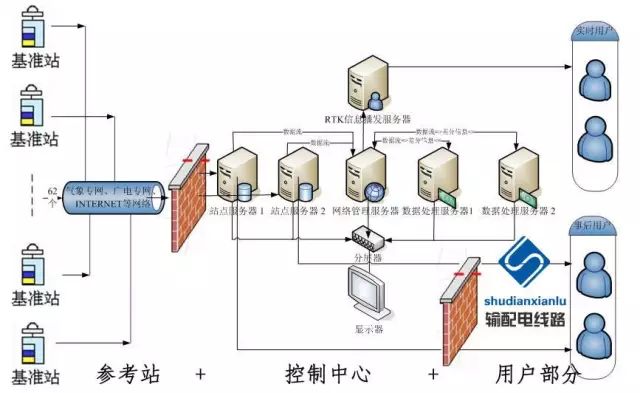
点击放大阅读

参 考 站

CORS综合应用
3.4 网络模式及具体操作
CORS流动站配置 :
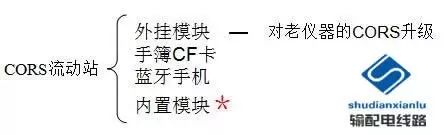
CORS流动站配置图
04点校正
4.1 各种坐标系统
4.1.1 1980西安坐标系
开始定义为 “1980国家大地坐标系”。1982 年,经天文大地网整体平差建立,全网共48433点。
属参心坐标系, IAG-75椭球(IAG—国际大地测量学协会),长半轴 a=6378140m; 扁率 α=1/298.257,原点在陕西省泾阳县。
椭球定位:
1.椭球短轴平行于地球地轴(由地球质心指向1968.0JYD方向);
2.起始子午面平行于格林威治天文台平均子午面;
3.椭球面与似大地水准面在我国境内密合得最佳。
4.1.2 1954年北京坐标系
50年代从前苏联引入(1942年普尔科夫坐标系),未进行整体平差,属参心坐标系, 克拉索夫斯基椭球体,长半轴 a=6378245m; 扁率α=1/298.3。原点在普尔科夫天文台。
主要缺点:
1.长半轴约大了108m ;
2.椭球定位西高东低,东部高程异常达67m;
3.不同区域接边处大地点坐标差达1~2m。
4.1.3 WGS-84大地坐标系
美国国防部研制确定的大地坐标系,Z轴指向BIH(国际时间局)1984.0定义的协议地球极(CTP)方向,X轴指向零子午面与CTP赤道交点,Y轴与X、 Z轴构成右手坐标系。
长半轴 a=6378137m;
扁率 α=1/298.257223563。
属地心坐标系,原点在地球质心。
4.1.4 新1954年北京坐标系(新54系)
属于参心大地坐标系,椭球的几何参数同“54系”。
a=6378245m;α=1/ 298.3
大地原点及椭球轴向同“80系”;高程基准面为1956年黄海平均高程面;点的坐标与“54系”接近,精度同“80系” 。
4.1.5 独立坐标系(地方坐标系)
为了减少投影变形或满足保密需要,也可使用独立(地方)坐标系,坐标原点一般在测区或城区中部,投影面多为当地平均高程面。
4.1.6 高程基准
1)、1956年黄海高程系
水准原点设在观象山,采用1950~1956年7年的验潮结果 计算的黄海平均海水面,推得水准原点高程为72.289m。
2)、1985国家高程基准
水准原点同 1956年黄海高程系,采用1952~1979年共28年的验潮结果,并顾及了海平面18.6年的周期变化及重力异常改正,计算的黄海平均海水面,推得水准原点高程为72.260m。
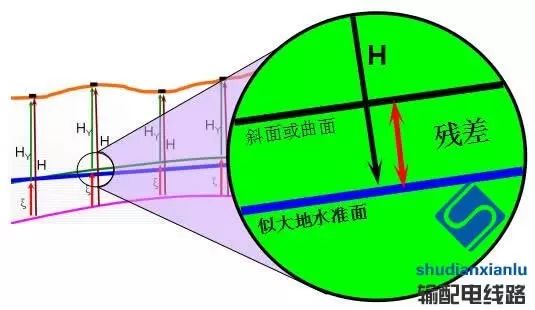
4.1.7 高程系统
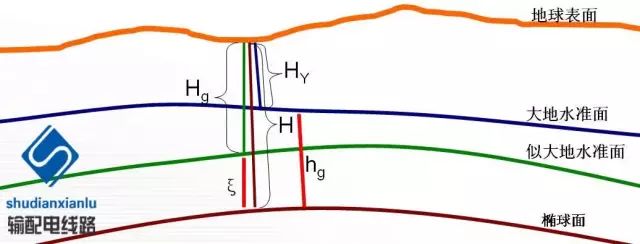
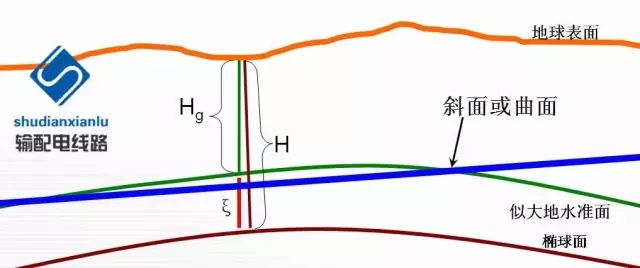
在测量中常用的高程系统有大地高系统、正高系统和正常高系统 。
大地高系统是以参考椭球面为基准面的高程系统。某点的大地高是该点到通过该点的参考椭球的法线与参考椭球面的交点间的距离。大地高也称为椭球高,大地高一般用符号H表示。大地高是一个纯几何量,不具有物理意义,同一个点,在不同的基准下,具有不同的大地高。
正高系统是以大地水准面为基准面的高程系统。某点的正高是该点到通过该点的铅垂线与大地水准面的交点之间的距离,正高用符号Hɡ。
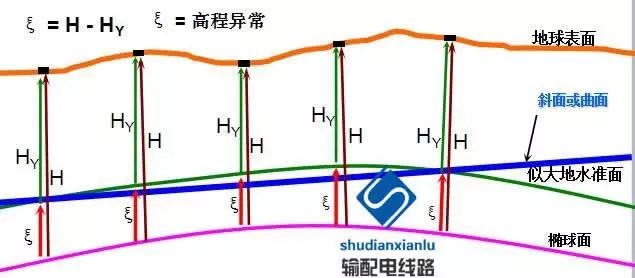
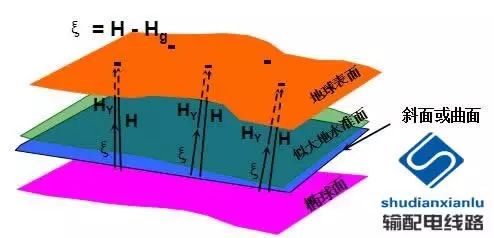
正常高系统是以似大地水准面为基准的高程系统。某点的正常高是该点到通过该点的铅垂线与似大地水准面的交点之间的距离,正常高用HY ,我国采用似大地水准面。
大地水准面差距,即大地水准面到参考椭球面的距离,记为 hg
hg= H – Hg
高程异常,即似大地水准面到参考椭球面的距离,记为ξ
ξ= H - HY
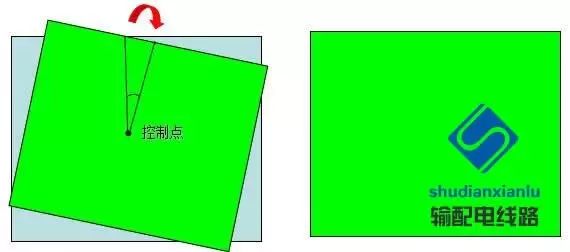
4.2 点校正
4.2.1 点校正的含义
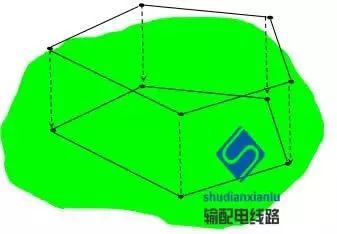
点校正就是求出WGS-84和当地平面直角坐标系统之间的数学转换关系(转换参数)。
在工程应用中使用GPS卫星定位系统采集到的数据是WGS-84坐标系数据,而目前我们测量成果普遍使用的是以1954年北京坐标系或是地方(任意|当地)独立坐标系为基础的坐标数据。因此必须将WGS-84坐标转换到BJ-54坐标系或地方(任意)独立坐标系。
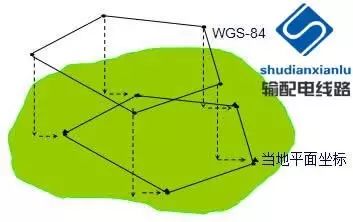
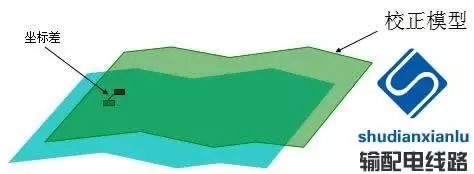
4.2.2 GPS点校正
把GPS坐标系统转换到我们的当地平面坐标系统
包括基准转换、投影、 水平 & 垂直平差
注:此独立坐标系是以北京54椭球为参考椭球的坐标系统。
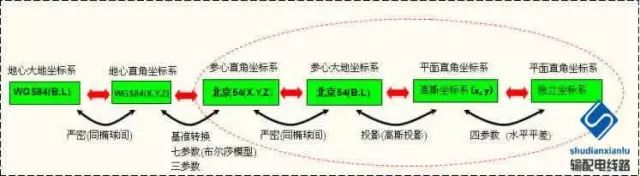
WGS84与当地坐标系(北京54椭球)的转换即参数转换的,具体过程:
1、(B、L)84——(X、Y、Z)84,空间大地坐标到空间直角坐标的转换。
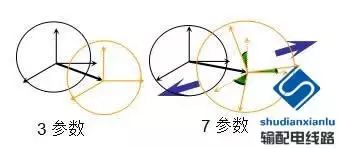
2、(X、Y、Z)84——(X、Y、Z)54,坐标基准的转换,即Datum转换。通 常有三种转换方法:Bursa–Wolf(布尔莎模型)七参数、简化三参数、 Molodensky 。
3、(X、Y、Z)54——(B、L)54,空间直角坐标到空间大地坐标的转换。
4、(B、L)54——(x、y)54, 高斯(Gauss)投影正算。
5、 高斯坐标系转换为当地坐标系(独立坐标系)
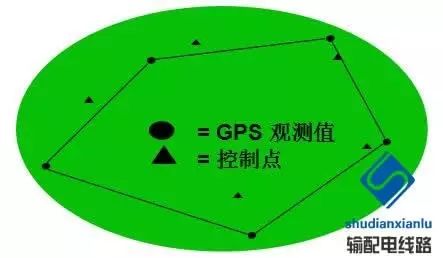
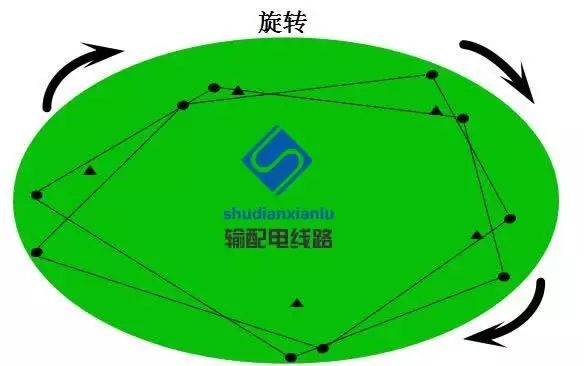
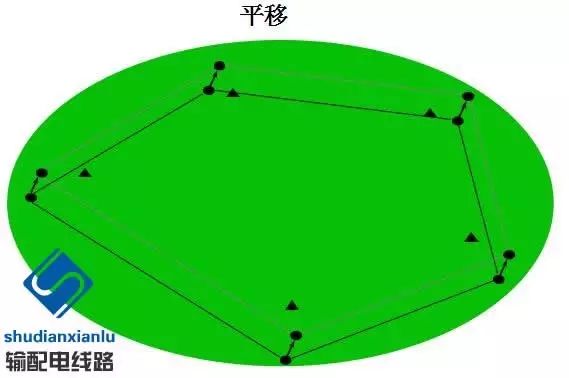
要使一个坐标系统和另一个坐标系统产生关系,需要一组具有这两套坐标系统下坐标的地面点。因此,就需要一组WGS-84坐标和一组当地平面坐标:北, 东和高程。

利用现有参数,如:七参数、三参数
点校正——直接求“四参数+高程拟合”;
两个椭球间的坐标转换一般而言比较严密的是用七参数法,即X平移,Y平移,Z平移,X旋转,Y旋转,Z旋转,尺度变化K。要求得七 参数就需要在一个地区需要3个以上的已知点;如果区域范围不大,最远点间的距离不大于30Km(经验值),这可以用三参数,即X平移,Y平移,Z平移,而将X旋转,Y旋转,Z旋转,尺度变化K视为0,所以三参数只是七参数的一种特例。七参数50平方公里以上,大到一个地区,一个市,如上海、北京等。
4.2.3 水平 & 垂直平差
a) 水平平差
至少2个水平控制点,下面以5个点为例
校正结果(水平残差)
校正后的结果包含了校正残差. 为了理解我们校正结果的好坏,我们需要理解这些残差的含义。

残差:校正执行后的格网平面坐标和GPS坐标的差值。
残差越小,说明校正的参数越精确--GPS (WGS-84 co-ordinates)和当地平面坐标之间的相对关系越好。
理想的残差应该小于 20mm,残差将被均匀的分布在各个校正点之间。
因此,我们最终坐标的最小精度应该是: 标准RTK 测量的误差加上最大的校正残差。
b) 垂直平差
高程处理的介绍;从理论上而言,平面坐标XY使用四参数是最精确的方法,高程使用高程拟合是最精确的方法 。
所以,在参数转换中,用四参数转换平面坐标,用高程拟合的方法转换高程是精度最好的方法。
高程拟合计算的方法:
1、加权均值法
2、多项式曲线拟合
3、多项式曲面拟合
4、多面函数曲面拟合
5、线性移动拟合法
6、神经网络法
… …
其中GPS 水准利用多项式曲面拟合法应用最广。
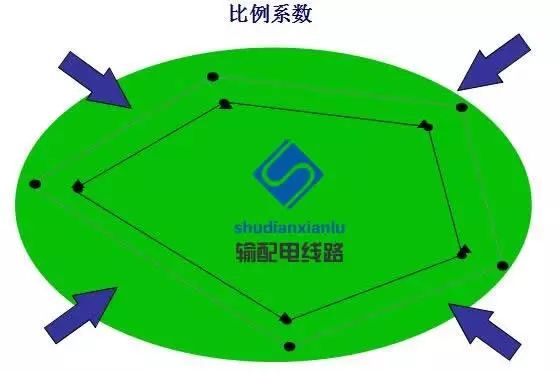
多项式曲面拟合法数据模型:
ξ= f ( x,y) + ε
1.单点的高程异常ξ与坐标( x,y) 之间函数关系如下:
ξ= f ( x,y) + ε
其中, f ( x , y) 为ξ中趋势值,似大地水准面;ε为模型误差
2 .当有多个点时, 写成矩阵形式如下:
ξ= XB+ ε
f ( x , y) = a 0 + a 1 x + a 2 y + a 3 x2 + a 4 xy + a 5 y2 + ⋯
对于每个已知点, 在最小二乘准则条件下,解出各a i , 求出测区范围内任何插值点的高程异常值ξ,进而计算出GPS 点的正常高。
注:两个已知点以下即为加权平均;三个已知点以上六个已知点以下为平面拟合;六个已知点以上为曲面拟合。
单点校正:
单点校正注意:
在不知道当地坐标系统的旋转,比例因子情况下:
单点校正:
1. 精度无法保障
2. 控制范围更无法确定
建议:尽量不要用这种方式。
两点校正:
可求出旋转,比例因子,各残差都为零。
两点校正注意:
1.可求出选转,比例因子 -从而了解当地坐标系统的大体情况
2. 控制范围与两点的长度有关,注意避免短边控制长边。
3.注意比例因子至少在0.9999***至1.0000****之间,超过此数 值,精度容易出问题或者已知点有问题。
4.如果控制点高程的精度可以全部参与校正。
5.注意旋转的角度,一般都比较小,都在度以下,如果旋转 上百度,就要注意是不是已知点有问题
另外还有三点与四点校正。
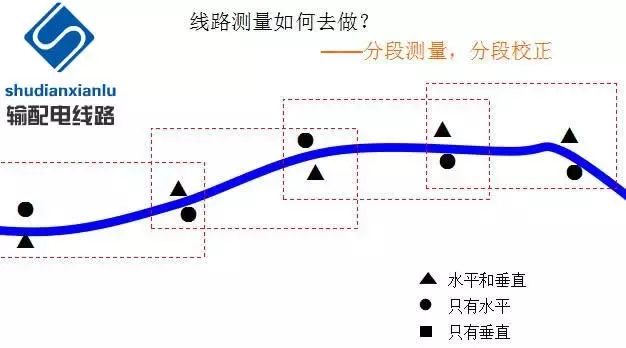
校正点的选取
1. 尽量避免单点校正,因为坐标系统中存在旋转,如果一定要用单点校正,一定要注意旋转大小,根据旋转大小,控制作业范围;
2. 注意控制范围,在一个测区要有足够的控制点,并避免短边控制长边;
★ 3. 对于高程要特别注意控制点的线性分布(几个控制点分布在一条线上),特别是做线路工程,参与校正的高程点建议不要超过2个点(既在校正时,校正方法里不要超过两个点选垂直平差的);
4. 注意坐标系统,中央子午线,投影面(特别是海拔比较高的地方),控制点与放样点是否是一个投影带;
5. 如果一个区域比较大,控制点比较多,要分区做校正,不要一个区域十几个点或更多的点全部参与校正;
6.注意所有残差,不要超过2厘米以上,否则检查控制点是否有误。
进行-点校正:
点击“测量”→“点校正”→“增加”,在“网格点名称”里选择一个已知点的当地平面坐标,点击“确定”,然后在“GPS点名称”里选择同一个已知点的经纬度坐标,点击“确定”,最后在“校正方法”里根据需要选择只有水平的校正或者水平和垂直的校正都应用,再点击“确定”即完成一个点的点校正,如果需要继续校正,重复这个步骤即可;所有的校正点都增加完毕以后,点击“计算”,再点击“确定”这样整个点校正的操作就完成了 。
05重设当地坐标
在每个测区进行测量和放样的工作有时需要几天甚至更长的时间,为了避免每天都重复进行点校正工作或者每次架在已知点上对中整平比较麻烦,而采取任意架设基准站或者自启动,可以在每天开始测量工作以前先做一下重设当地坐标的工作,进行整体平移 。
任意架设基准站或自启动时
为了架设基准站更加方便快捷,或者选择更加合适的地方架站,而采用任意架设设基准站(点此处)或着自启动,就算在同一个位置,基准站坐标正好相差单点定位离散度的差值,一般15米以内;所以重设时,重设此基准站下面的那一个控制点都可以.
06 RTK的精度
◆ RTK标称精度:
水平为1cm+1ppm·D
高程为2cm+1ppm·D,其中(D为基站与流动站的距离,单位为km,随着距离的增大精度会不断增大)
◆ 转换参数:
对于作点校正求出的是:四参数+高程拟合,对于校正点本身的精度,点的分布情 况,以及采用的拟合方式尤为重要,直接关系到成果的可靠性,而点的分布又是重中之重特别是对于高程的影响。
◆ 人为误差:
人为的扶杆,对中误差
◆ 仪器的稳定性:
接收机定位的稳定性,观测数据的置信度。